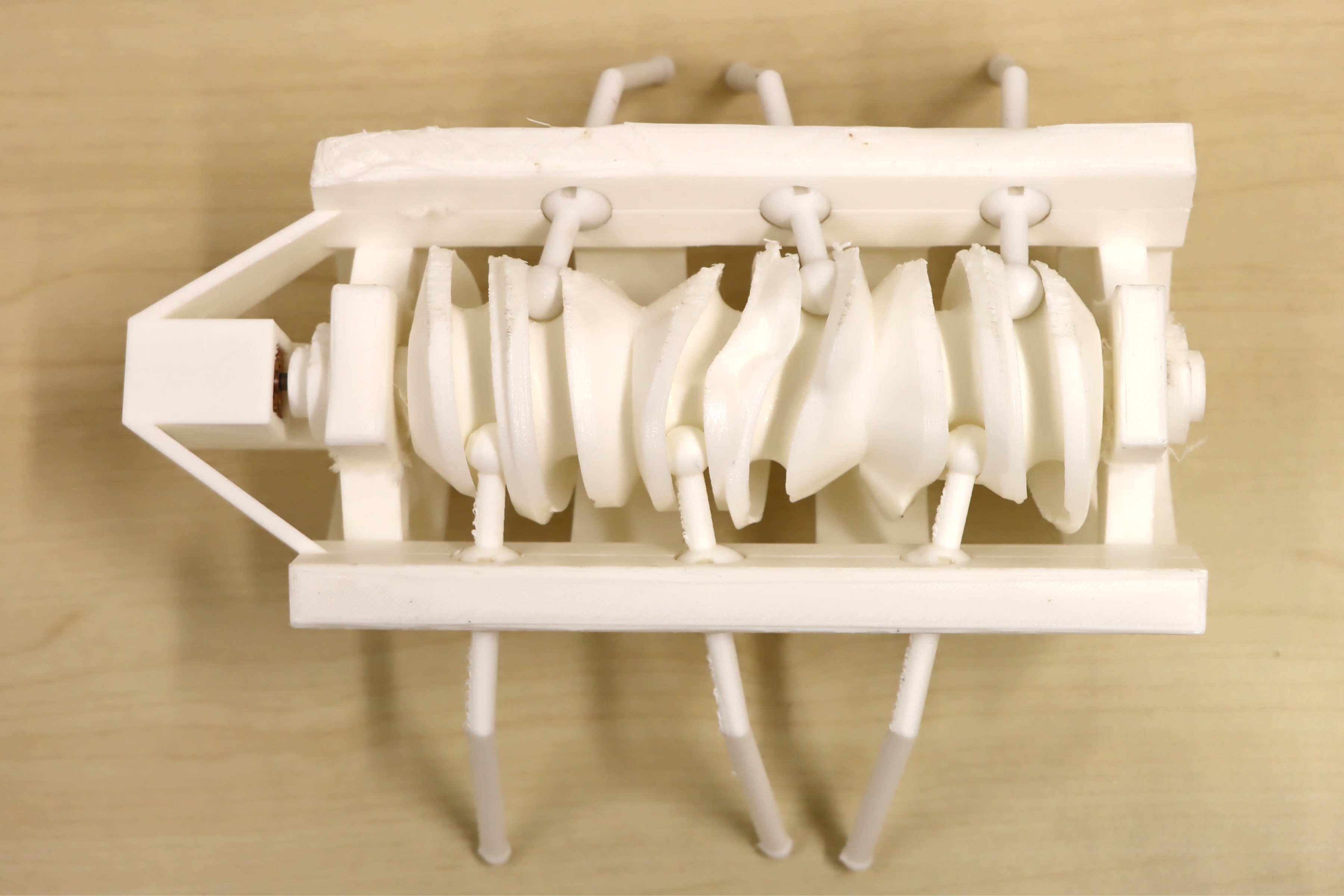
A 6-leg walking robot designed by our approach, where the core is our composite cam-follower mechanism.