mpcMech: Multi-Point Conjugation Mechanisms |
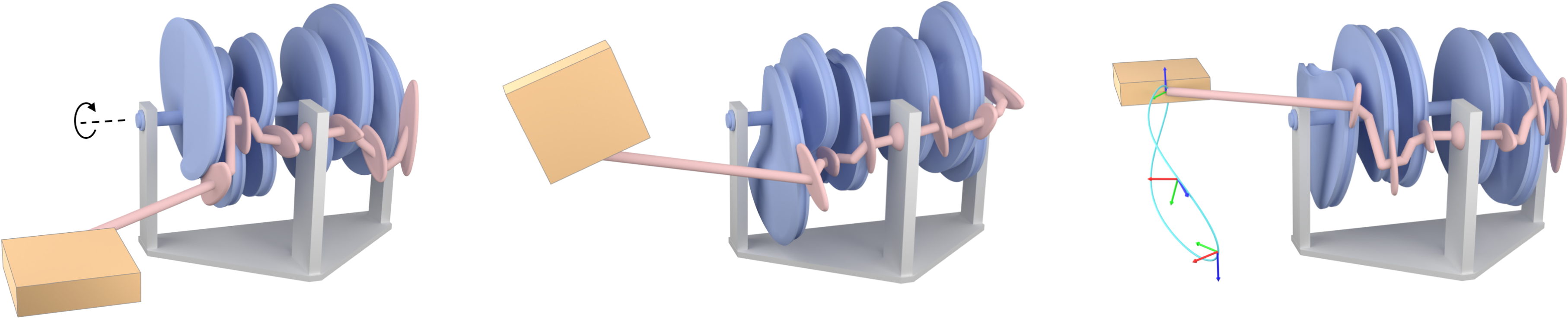
Figure 1: We present a computational approach for modeling a multi-point conjugation mechanism capable of generating a user-specified 3D motion, e.g., for manipulating a box, driven by a single actuator. Our mechanism features a simple topology comprising only two moving parts, modeled as a pair of conjugate surfaces with multiple conjugation points.
Abstract
A mechanism is an assembly of moving parts interconnected by joints to transfer an input motion to a desired output motion. Traditionally, to generate a complex motion, mechanisms are modeled by selecting and combining a number of mechanical parts with simple shapes such as links, gears, and cams. Combining multiple mechanical parts results in a mechanism with an intricate topology, which not only complicates assembly and maintenance but also deteriorates the functionality of generating motions due to accumulation of manufacturing imprecisions. To get rid of these limitations, we study mechanisms with a single pair of moving parts for generating complex motions. We model the pair of moving parts as a pair of conjugate surfaces with multiple conjugation points, forming a multi-point conjugation mechanism.
To study this new mechanism, we establish a connection between conjugate surface pairs and form-closure grasps to formulate a dynamic form closure condition under which one conjugate surface is able to continuously transfer the motion to the other conjugate surface by utilizing multiple conjugation points. Guided by the condition, we propose an optimization-based approach to model the geometry of a multi-point conjugation mechanism for exactly generating a user-specified motion, in 1-, 2-, or 3-DOF motion space. The core of our approach is to model multiple conjugate curve pairs that satisfy various requirements in multi-point conjugation, dynamic form closure, and surface fabricability. We demonstrate the effectiveness of our approach by modeling different classes of multi-point conjugation mechanisms to generate various motions, evaluating the mechanisms' kinematic performance with 3D printed prototypes, and presenting three applications of these mechanisms.
Download
Paper PDF (~25.7M)Supplementary PDF (~0.6M)
Video
Results
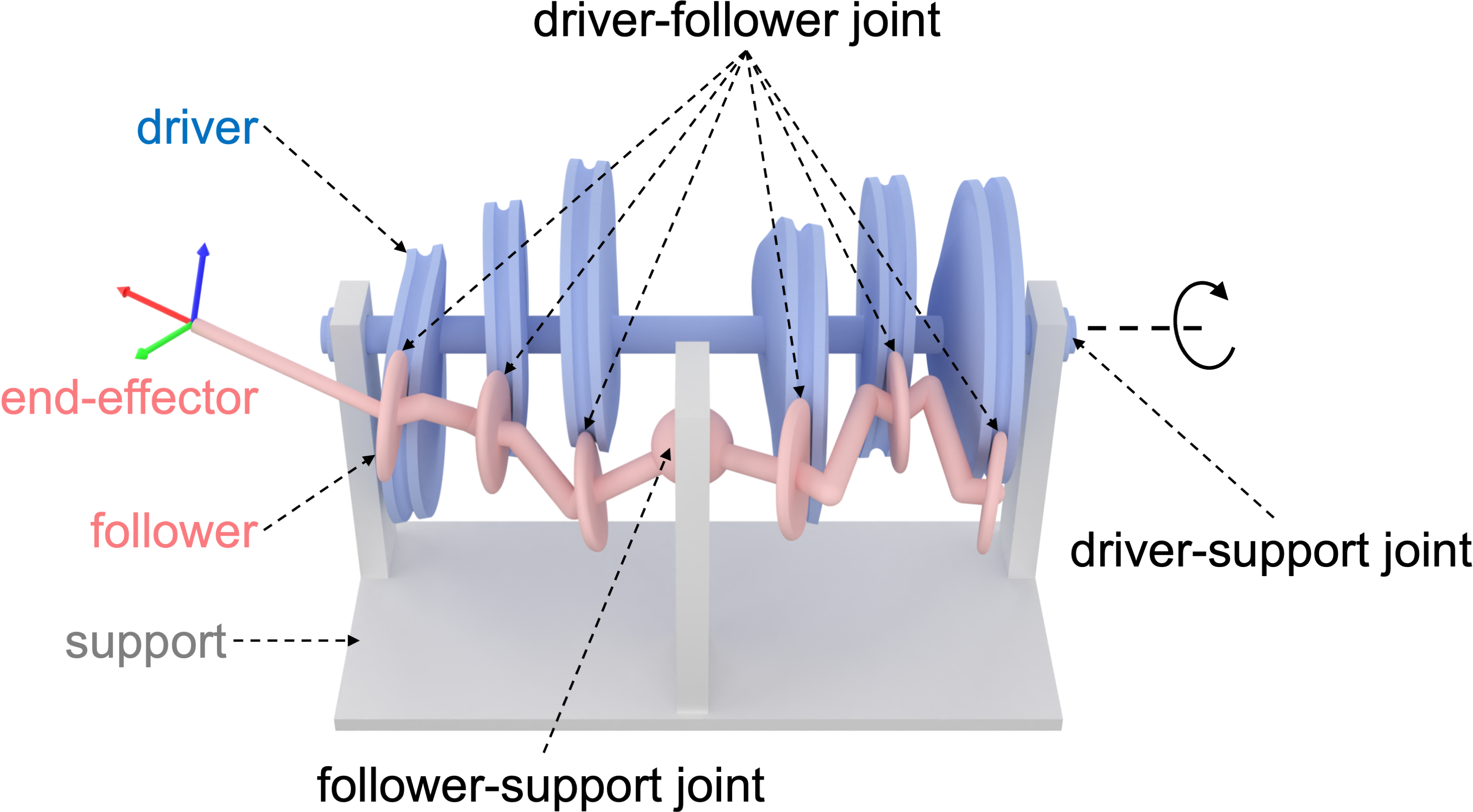
Figure 2: An example multi-point conjugation mechanism (mpcMech_3R), where the follower-support joint is a spherical joint, allowing 3-DOF rotation of the follower.
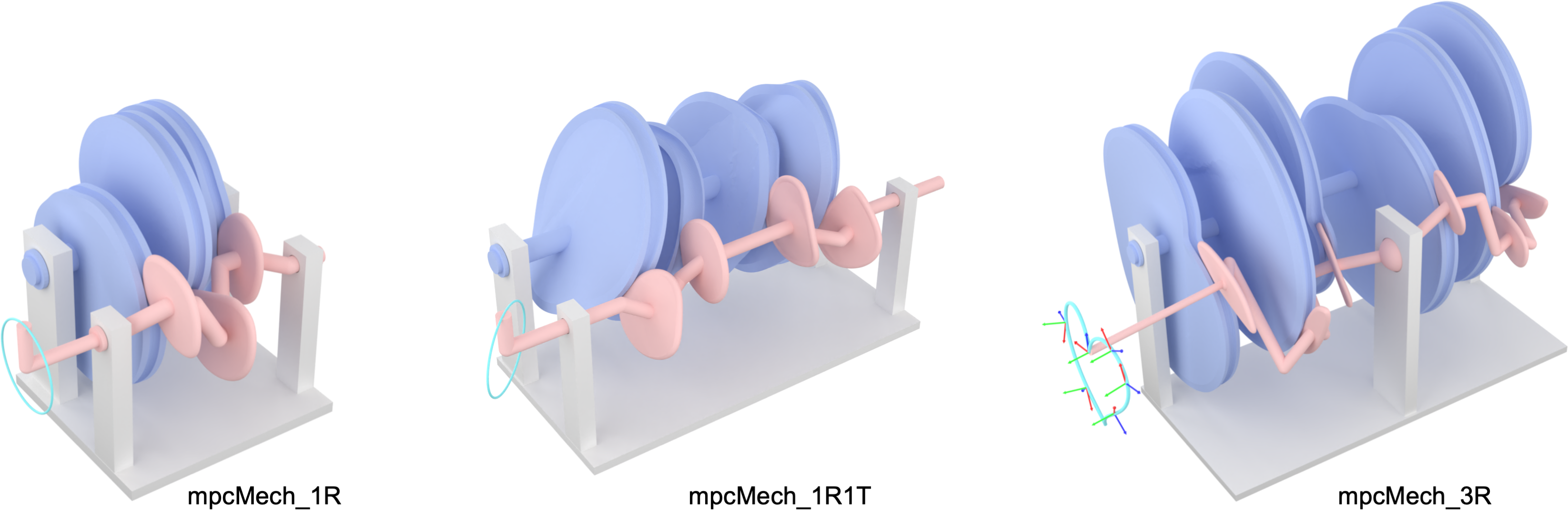
Figure 3: mpcMechs modeled by our approach to generate motions in different kinds of motion space: (a) 1-DOF rotation, (b) 1-DOF rotation and 1-DOF translation, and (c) 3-DOF rotation space.
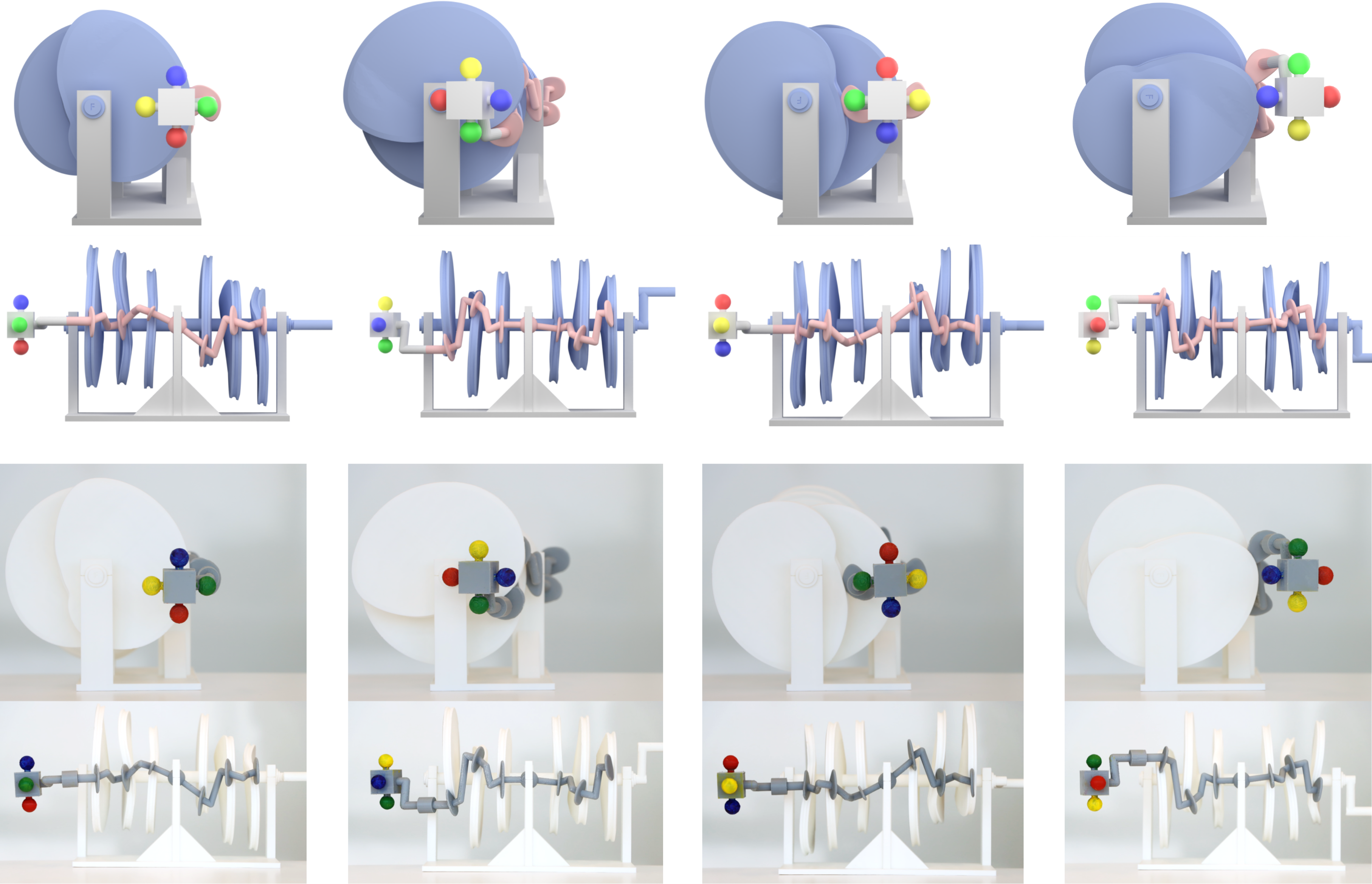
Figure 4: Evaluating kinematic performance of a mpcMech_3R for generating a 3D motion. (Top) Four key poses generated by our modeled mpcMech from the front and side views, where the leftmost one shows the first key pose. (Bottom) The 3D printed prototype in the corresponding configurations and views.
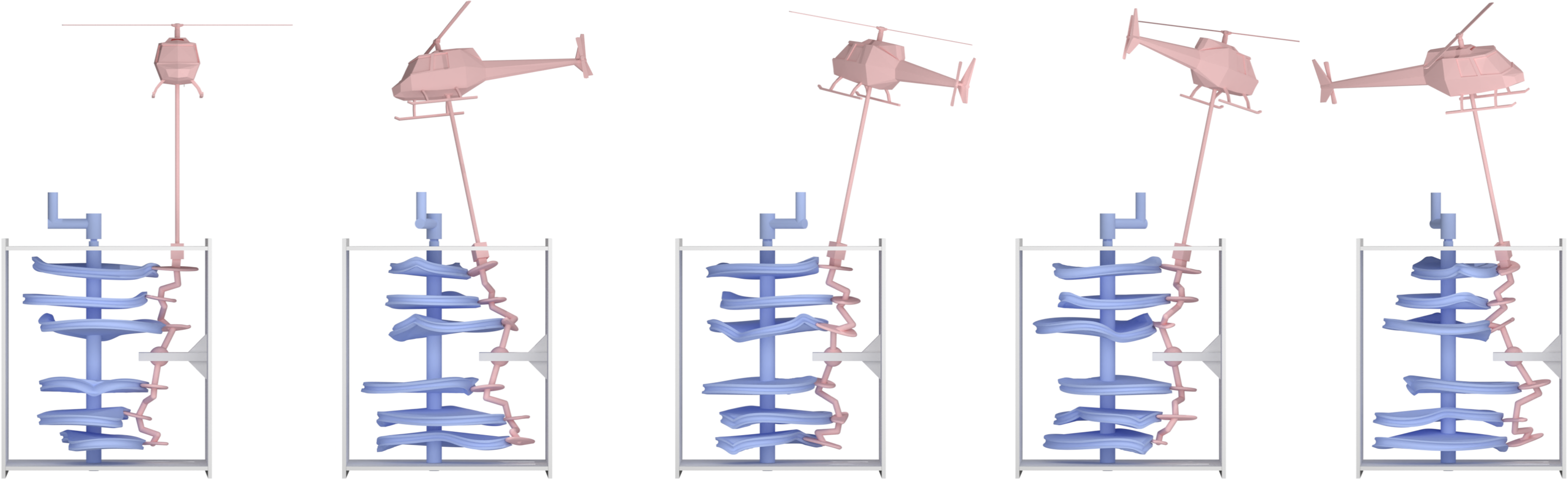
Figure 5: A mechanical toy in which a mpcMech is modeled by our approach to control the flying motion of a helicopter.
Acknowledgments
We thank the reviewers for their valuable comments, Ruohan Geng, Haixin Zhu and Yanyan Yang for discussion on theory of dynamic form closure in the paper. This work was supported by the Singapore MOEAcRF Tier 2 Grant (MOE-T2EP20222-0008), the SingaporeMOE AcRF Tier 1 Grant (RG12/22), and the National Natural Science Foundation of China (62025207).
Bibtex
@article {Chen-2024-mpcMech,author = {Ke Chen and Siqi Li and Peng Song and Jianmin Zheng and Ligang Liu},
title = {mpcMech: Multi-Point Conjugation Mechanisms},
journal = {ACM Transactions on Graphics (SIGGRAPH Asia)},
volume = {43},
number = {6},
pages = {211:1 -- 211:14},
year = {2024}}