Conformable Mechanisms on Freeform SurfacesShape Modeling International 2025, full paper |
Figure 1: We present a computational approach for modeling and designing a new class of linkage mechanisms called conformable mechanism. A conformable mechanism conforms to a freeform surface in its stowed state (left) and deploys from that surface to accomplish a motion transfer task (middle and right); see the 3D path (in green color) generated by the mechanism. Thanks to the surface conformity, our conformable mechanism is compact in its stowed state.
Abstract
We introduce a new class of linkage mechanisms called surface-conformable mechanisms or simply conformable mechanisms. A conformable mechanism conforms to a freeform surface in one of its configurations, in which the mechanism’s joints and links are exactly on the surface. Conformable mechanisms can be stowed compactly when not in use and accomplish complex motion transfer tasks when deployed. This paper aims to model and design conformable mechanisms for 3D path and motion generation. To achieve this goal, we enumerate topologies of conformable mechanisms, and model their geometry in the parameterization space of a freeform surface for surface conformity. To ensure a working and fabricable mechanism, we propose an efficient approach to processing the freeform surface by first removing a portion of the surface that collides with the moving links and joints and then removing disconnected patches and fragile features from the surface. Taking the modeling and processing as a foundation, we propose an optimization-based approach to designing a conformable mechanism for generating a target 3D path/motion, while preserving the mechanism’s appearance in the stowed state. We demonstrate the effectiveness of our approach by designing conformable mechanisms that conform to various freeform surfaces, evaluating their kinematic performance in 3D path and motion generation, validating their functionality with a 3D printed prototype, and showing three applications of these mechanisms.
Download
Paper PDF (~22.2M)Supplementary PDF (~0.8M)
Source Code
Video
Results
Figure 2:
(Left) User inputs are a reference surface, a target 3D path represented by a sequence of 3D points(in purple color), and a desired
mobility type (transmobility in this example). (Right) Our approach designs a conformable mechanism that conforms to the reference surface and generates a 3D path (in green color) that approximates the target one
Figure 3: Our approach allows designing a conformable mechanism that conforms to a reference surface with a variety of shapes.
Figure 4: Given the same reference surface, we design conformable mechanisms with four joints to generate 3D paths represented by (a) 2, (b) 3, (c) 4, (d) 5, and (e) 6 points, respectively. We also design a conformable mechanism with five joints to generate a 3D path represented by (f) 6 points.
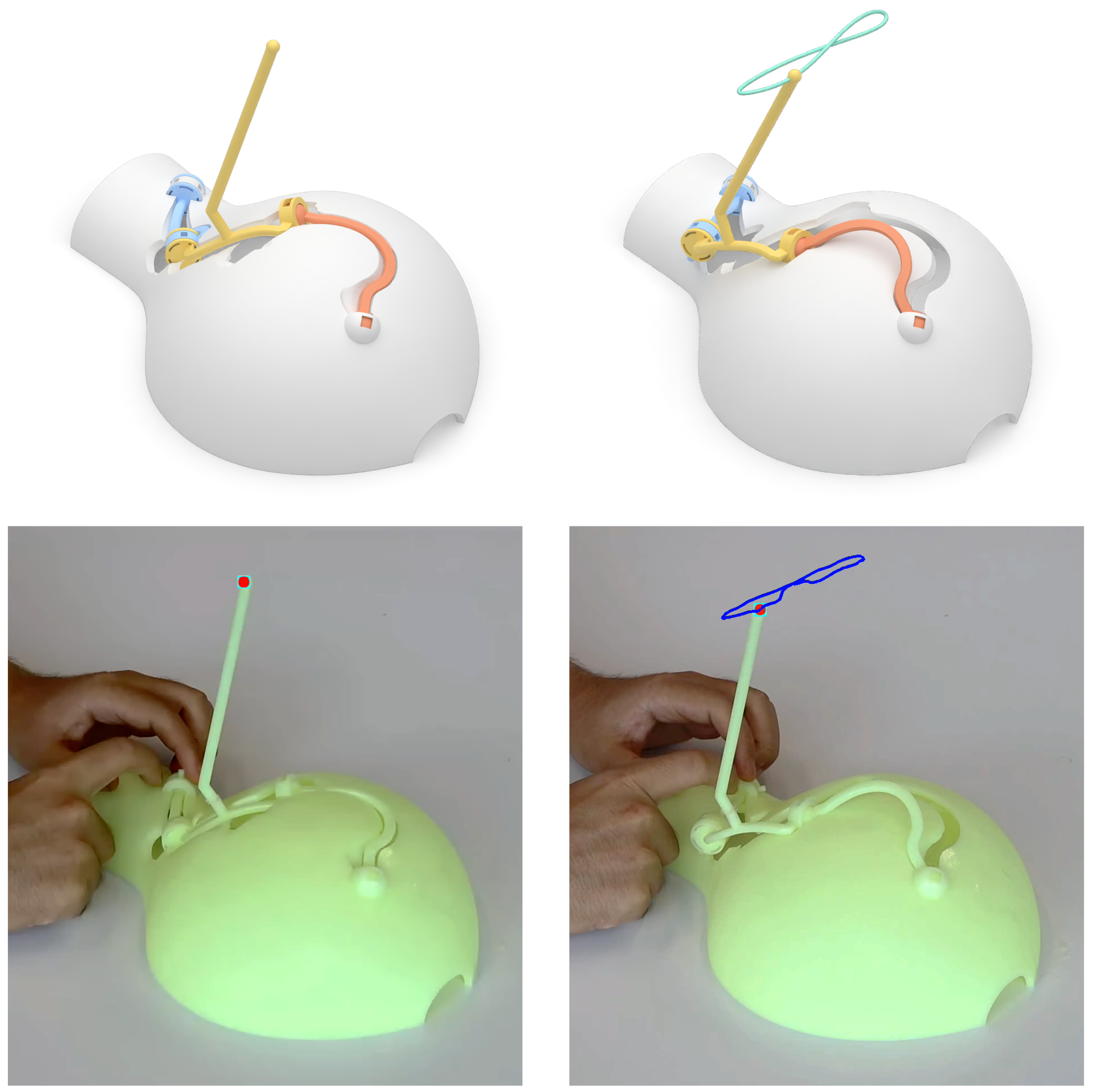
Figure 5: Validating functionality of our conformable mechanism. (Top) Our designed conformable mechanism in a stowed state and a working state, where the generated path is in green color. (Bottom) The 3D printed mechanism in the corresponding configurations, where the generated path is tracked on video images and visualized in blue.
Acknowledgments
We thank the reviewers for their valuable comments. This work was supported by the MOE AcRF Tier 2 Grant of Singapore (MOE-T2EP20222-0008), the MOE AcRF Tier 1 Grant of Singapore (RG12/22), and the Taith Research Mobility Funding.
Bibtex
@article {Li-2025-ConformMech,author = {Siqi Li and Haoyu Tang and Peng Song and Bailin Deng and Jianmin Zheng},
title = {Conformable Mechanisms on Freeform Surfaces},
journal = {Computers & Graphics (Proc. of Shape Modeling International)},
year = {2025}}