Computational Design of Coordinate-Motion AssembliesSIGGRAPH 2026, conference paper |

Figure 1: We propose a computational approach for designing coordinate-motion assemblies, which can be disassembled only by using a coordinated motion of component parts specified by users. We demonstrate this with a three-piece Bunny assembly. The columns display the initial, intermediate, and fully disassembled configurations, with the physical prototype (top) matching the virtual design (bottom). Colored arrows indicate the translational directions along which the parts must move simultaneously to reach the next configuration.
Abstract
Coordinate-motion assemblies can only be disassembled by the simultaneous motion of multiple parts along distinct paths, providing high structural stability and enabling efficient robotic assembly. Existing examples are largely limited to architectural structures using joint-based connections, or puzzles created through trial-and-error, as the relationship between part geometry and coordinate motion remains poorly understood. Computationally designing such assemblies is challenging because it requires jointly achieving distributed contacts across the entire assembly and a unique coordinate motion for disassembly that rules out other feasible motions. We address this challenge by establishing a theoretical connection between part geometry and unique coordinate motion, enabling us to rigorously verify whether a given assembly admits a unique coordinate motion. Building on this theory, we introduce a two-stage algorithm that optimizes contact interfaces for a target motion and constructs physically feasible part geometries that conform to a user-specified global shape. We demonstrate our approach on models with complex geometries and topologies, including assemblies with large part counts, and validate it through physical fabrication and experiments.
Download
Paper PDF (~36.0M)Supplementary PDF (~73.6K)
Source Code
Video
Results

Figure 2:
Overview of our approach.
(a) Given a target global shape and a desired coordinate motion,
(b) we place a reference sphere inside the shape, and
(c) partition it according to the prescribed coordinate motion to initialize an abstract contact model.
(d) Next, we optimize the abstract contact model to enforce unique coordinate motion.
(e) Finally, we construct full part geometries by clipping with the global shape and enforcing fabrication constraints.
(f) A 3D printed prototype that validates the physical feasibility and motion correctness of the designed assembly.
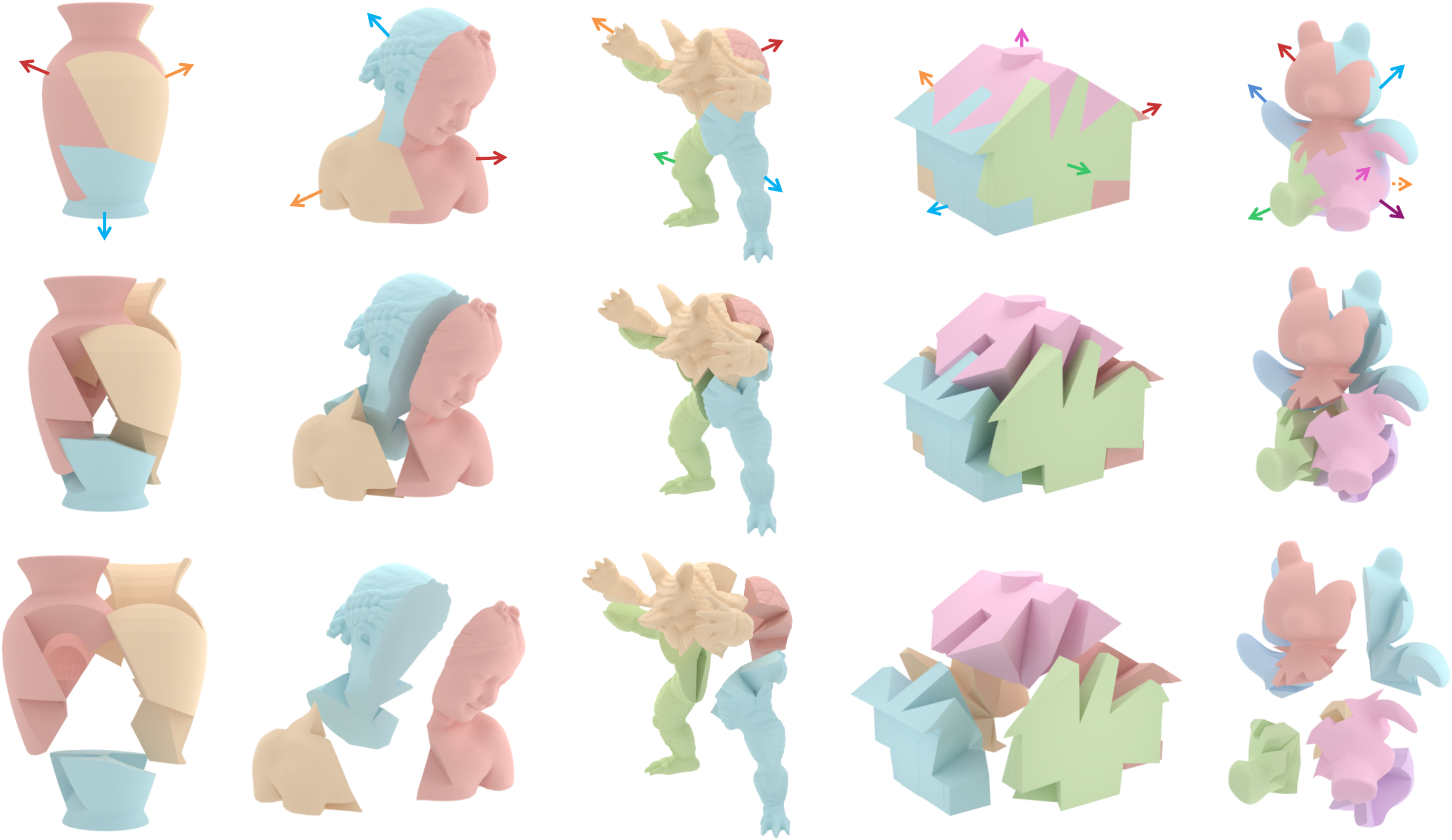
Figure 3:
Our approach allows modeling coordinate-motion assemblies with various shapes.
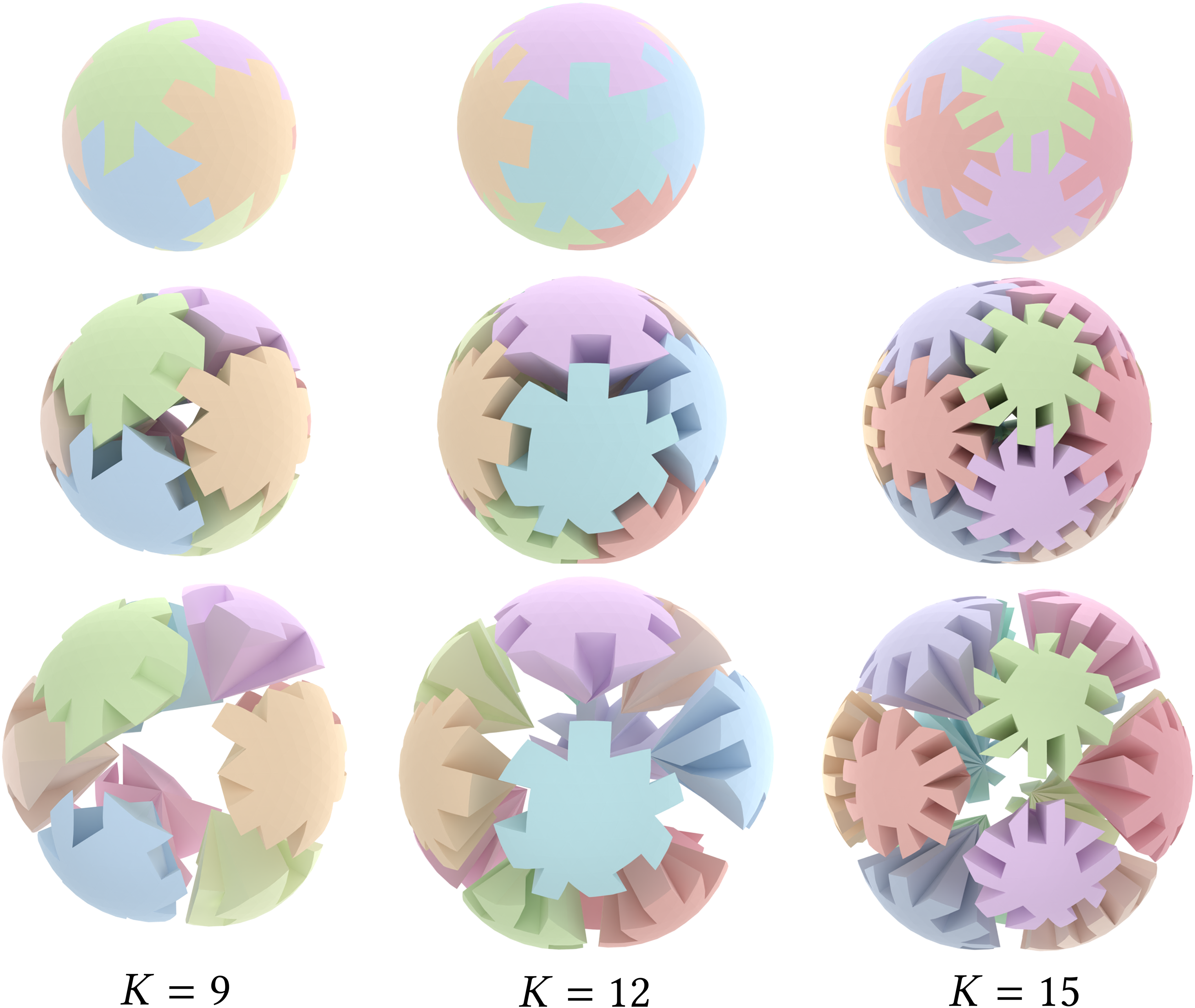
Figure 4:
We evaluate the scalability of our approach by generating coordinate-motion assemblies with varying numbers of parts (up to 15).
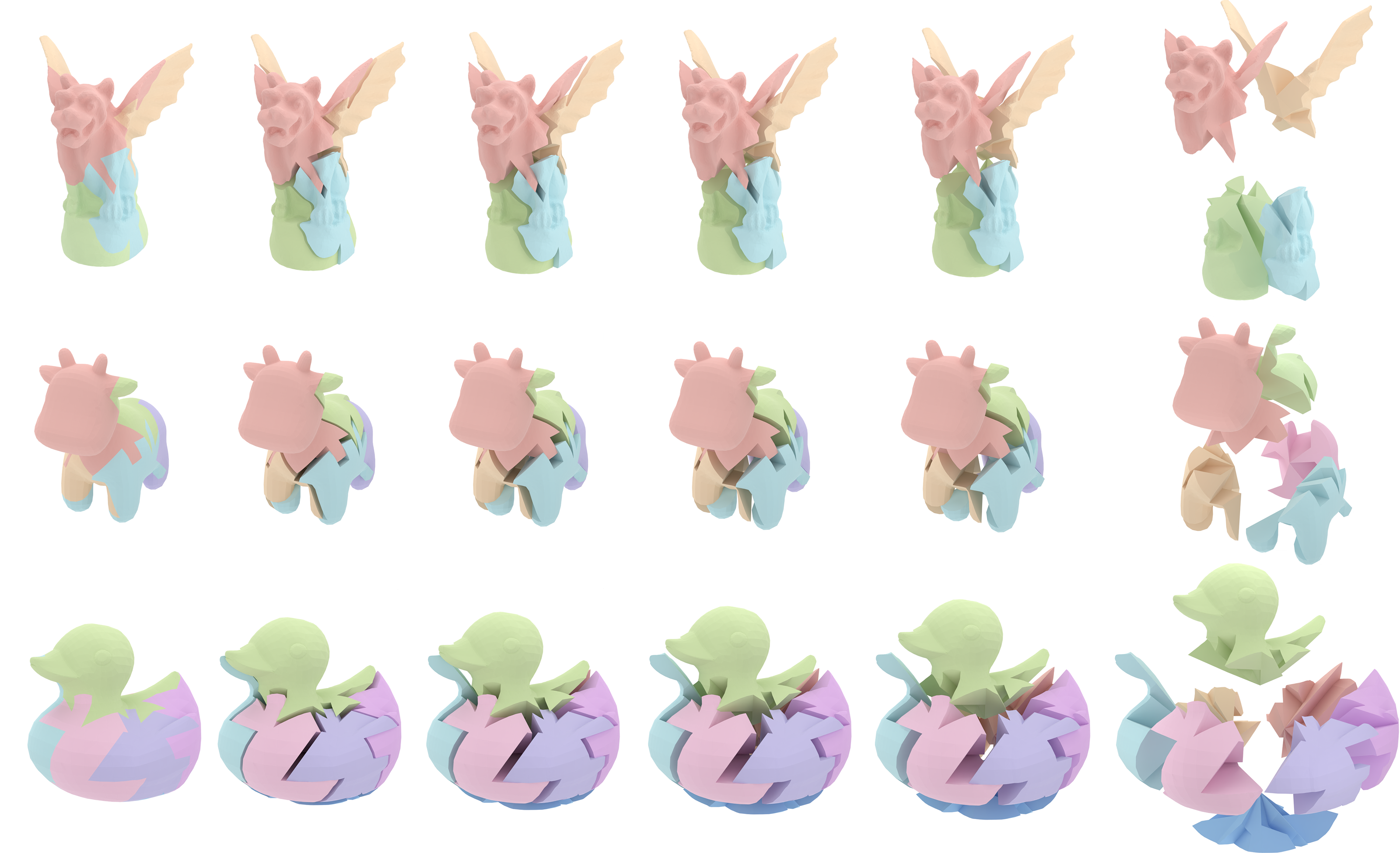
Figure 5: We show the disassembly of three results via coordinate motion of the component parts.

Figure 6: The disassembly sequence of our 3D-printed results. The fabricated prototypes confirm that our designs realize the intended disassembly via unique coordinate motion.
Acknowledgments
We thank the reviewers for their valuable comments. This work was supported by the Singapore MOE AcRF Tier 2 Grants (MOE-T2EP20222-0008, MOE-T2EP20123-0016), Laoshan Laboratory (No. LSKJ202300305) and the National Natural Science Foundation of China (62025207).
Bibtex
@inproceedings {Lu-2026-Coordinate-MotionAssemblies,author = {Yukun Lu and Ke Chen and Ligang Liu and Peng Song},
title = {Computational Design of Coordinate-Motion Assemblies},
booktitle = {SIGGRAPH 2026 Conference Papers},
year = {2026}}